
RTK高精度定位数据如何传?芮捷模组来帮忙!
发布时间:2022-11-14 浏览次数:125次
一、什么是RTK?
RTK (Real-Time Kinematic)定位技术是一种基于全球定位系统(北斗,GPS, GLONASS等)的高精度差分定位技术。通过使用额外的基站来提供高精度的参考信号,实时计算接收器的位置误差并进行校正。RTK定位技术可以实现厘米级的定位精度。
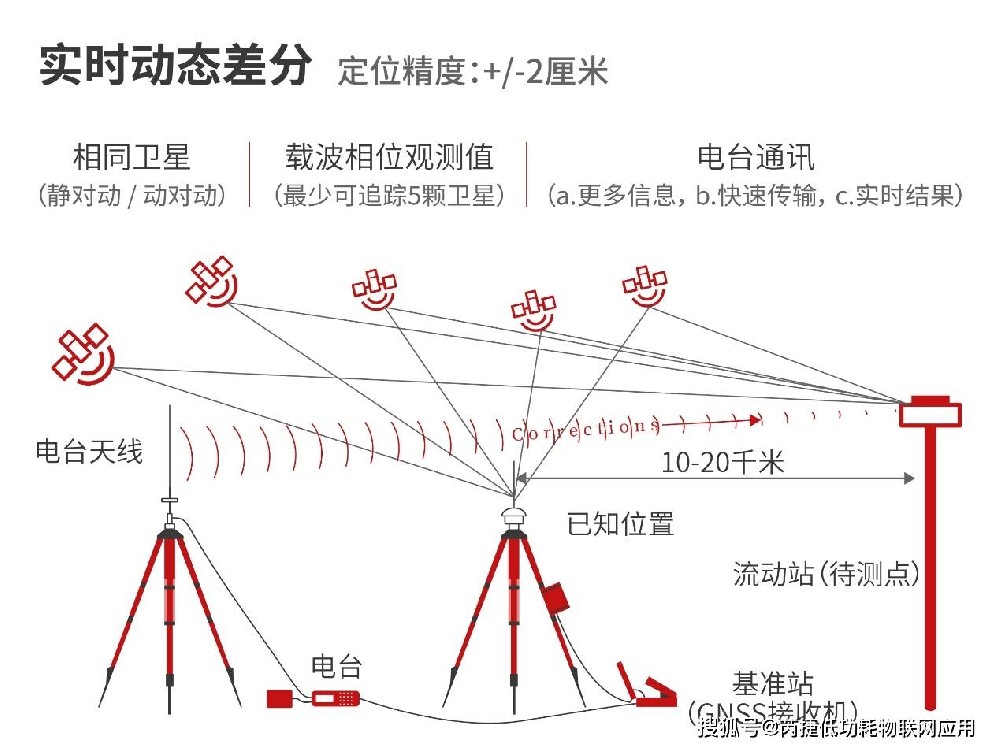 RTK工作原理
RTK工作原理
如上图所示,这是一个标准的传统RTK组网。其中,除了卫星之外,RTK系统包括两个重要组成部分——基准站和流动站。
两个站都带有卫星接收机,可以观测和接收卫星数据。顾名思义,基准站是提供参考基准的基站。而流动站,是可以不断移动的站。流动站其实就是要测量自身三维坐标的那个对象目标,也就是用户终端。
首先,基准站作为测量基准,一般会固定放在开阔且视野良好的地方。基准站的三维坐标信息,一般是已知的。基准站先观测和接收卫星数据;基准站通过旁边的无线电台(数据链),将观测数据实时发送给流动站(距离一般不超过20公里);流动站收到基准站数据的同时,也观测和接收了卫星数据;流动站在基准站数据和自身数据的基础上,根据相对定位原理,进行实时差分运算,从而解算出流动站的三维坐标及其精度,其定位精度可达1cm~2cm。
RTK技术具有观测站之间无需通视(无需在视线范围内)、定位精度高、操作简单、全天候作业等优点,是非常不错的定位技术。那么问题来了,基准站该如何发送定位数据给流动站呢?芮捷提供了基于LoRa的高速远距离模组解决方案。
二、芮捷LoRa模组
通用LoRa模组因其设计场景针对的是低功耗、远距离、小数据量的传感终端设备而设计,在传输大数据量的数据包时具有一定的局限性,如单包限制不超过255字节等。针对RTK定位数据量大的特性,我们特别设计了一款双频LoRa模组,不仅可以支持基准站和流动站之间的RTK数据传送,还可以支持基准站和流动站之间的中继转发。
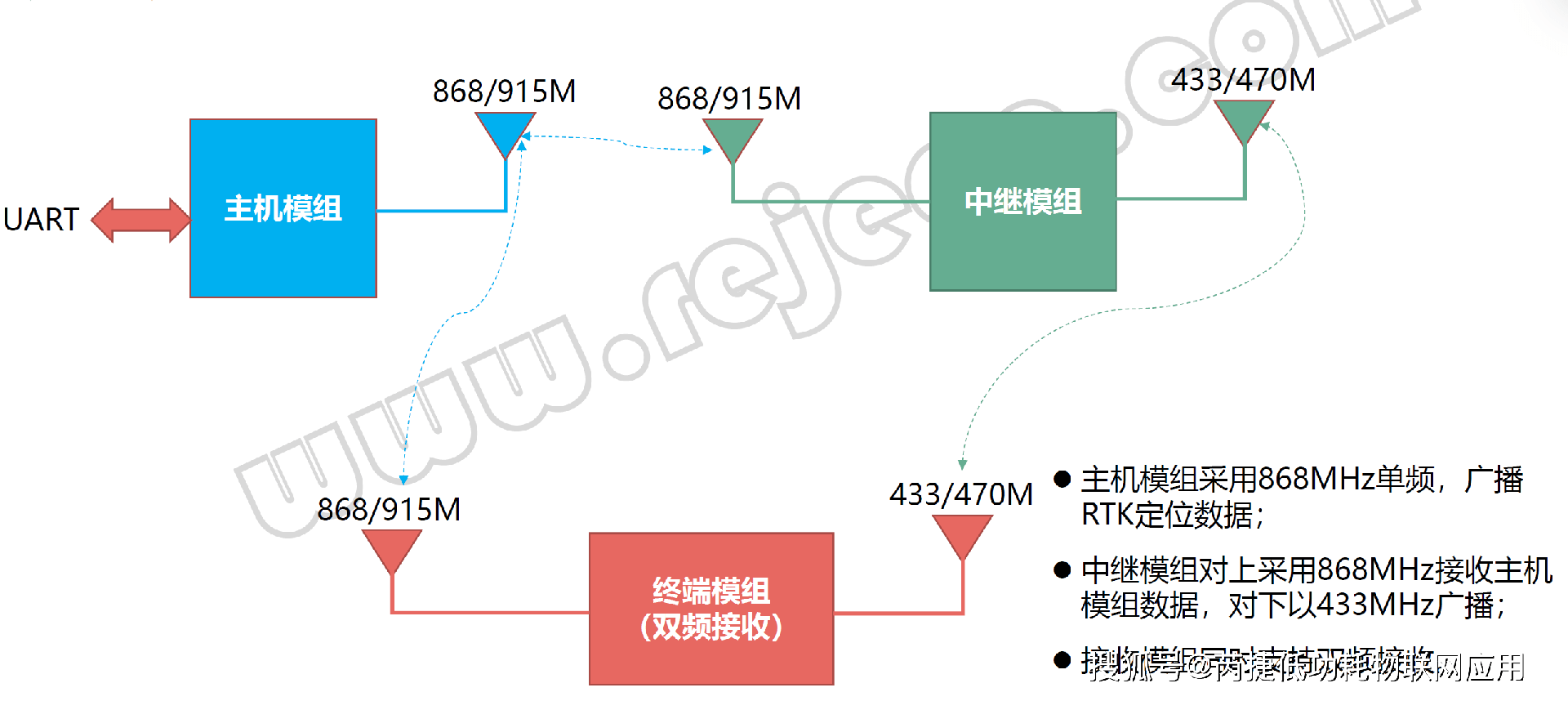 数据链路方案框图
数据链路方案框图
如上框图所示,主机(基准站)以868M频段定时广播RTK高精度定位数据;中继站接收868M的RTK定位数据,并通过433M频段实时转发;终端节点(流动站)实时接收主机及中继站的定位数据;所有传输可支持双向通信,支持应答和自动重传,软件协议上确保数据传输的成功率。
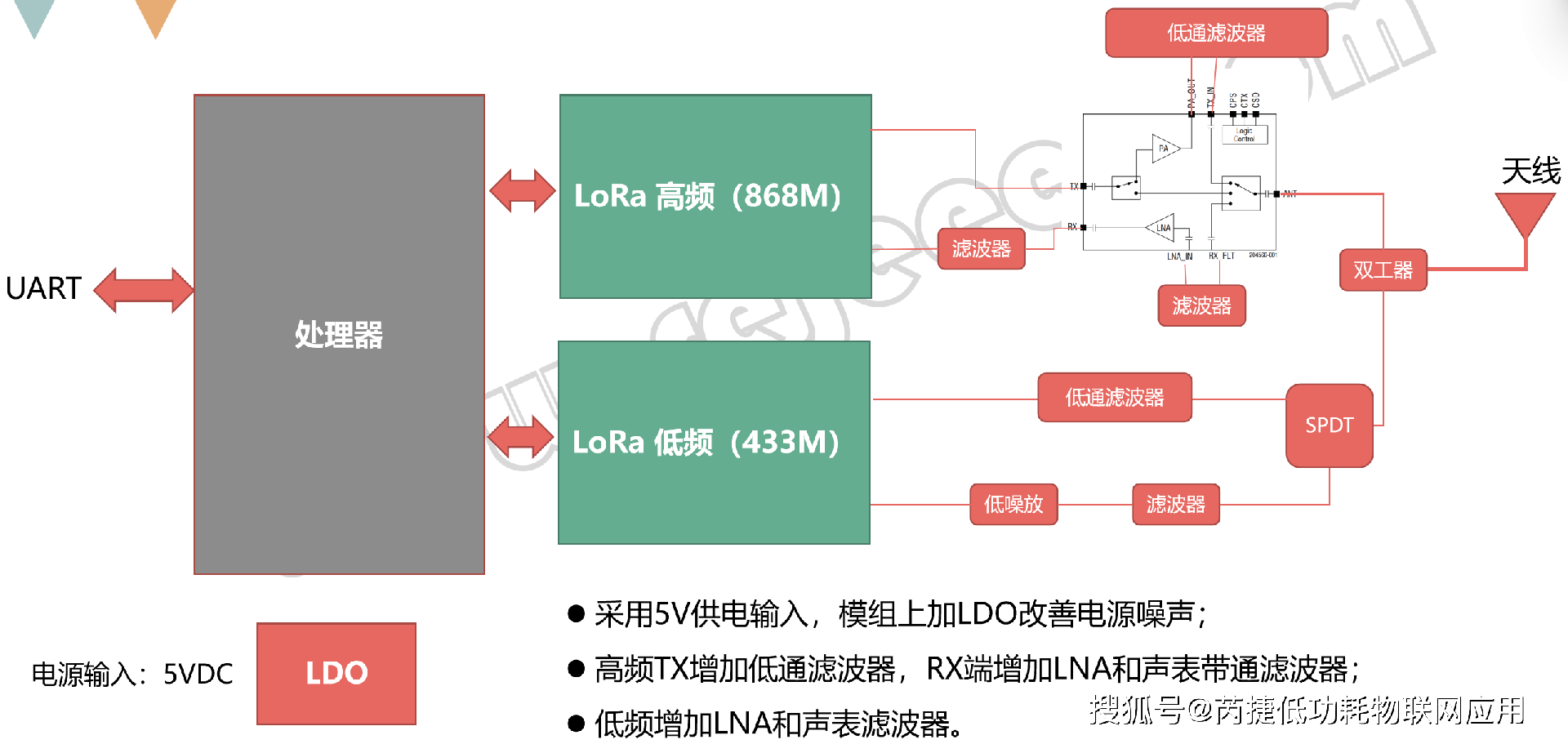 模组硬件框图
模组硬件框图
模组硬件框图如上图,此模组同时支持双频(高频868/915MHz和低频433/470MHz)通信,内置LNA与双工器,单天线,增加多级滤波器降低系统噪声的影响,接收性能优越,支持主站模式、中继模式与终端模式,有效传输速率可达20kbps,空旷传输距离可达1~2km(如需要更远传输距离,可抬高发射功率)。
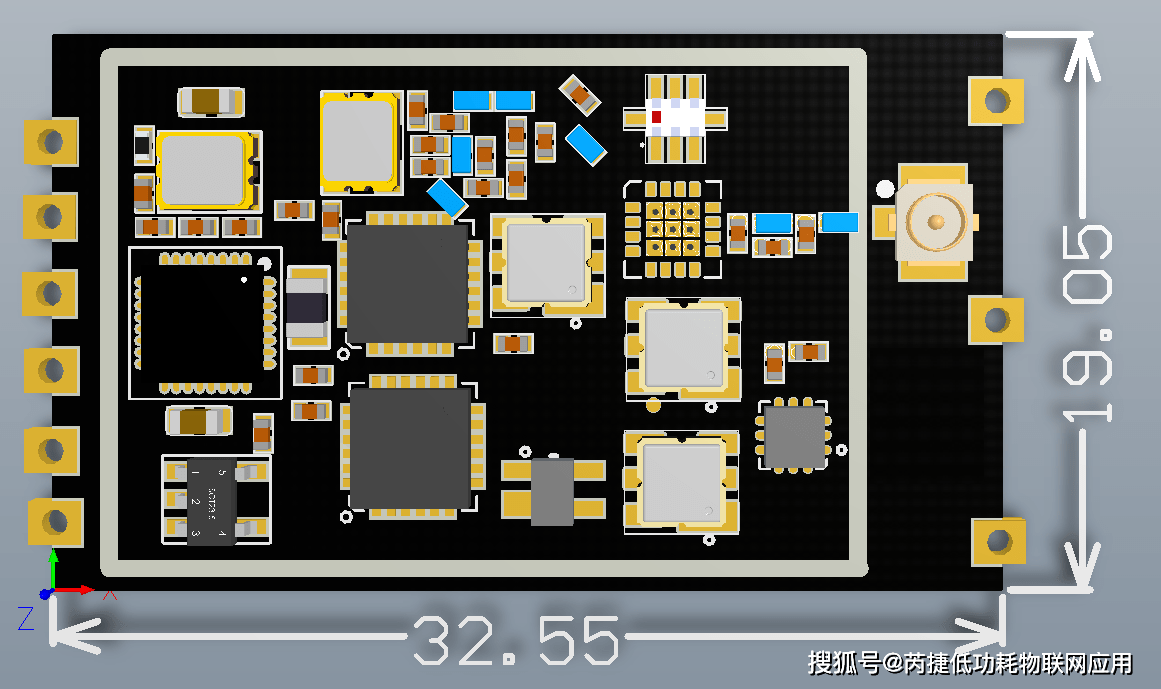 模组封装尺寸
模组封装尺寸
模组尺寸32.5*19mm,邮票孔封装,带I-PEX天线座,使用简单。
contact us
联系我们
 服务热线:153 3519 3612
服务热线:153 3519 3612 电子邮箱:Lewis.zhu@rejeee.com
电子邮箱:Lewis.zhu@rejeee.com 企业QQ:15170626(腾讯QQ)
企业QQ:15170626(腾讯QQ) 江苏省南京市浦口区星火路软件大厦
江苏省南京市浦口区星火路软件大厦